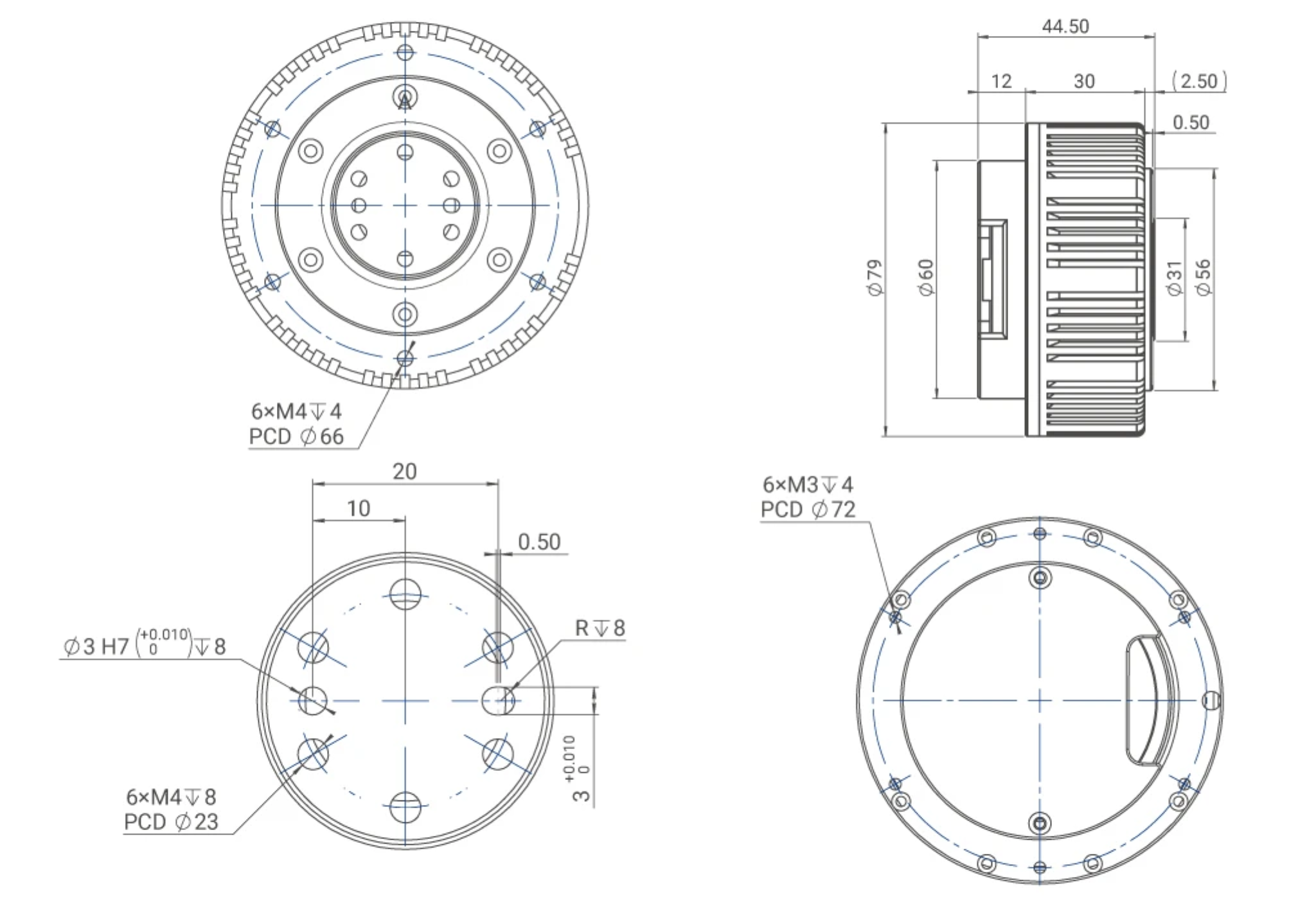
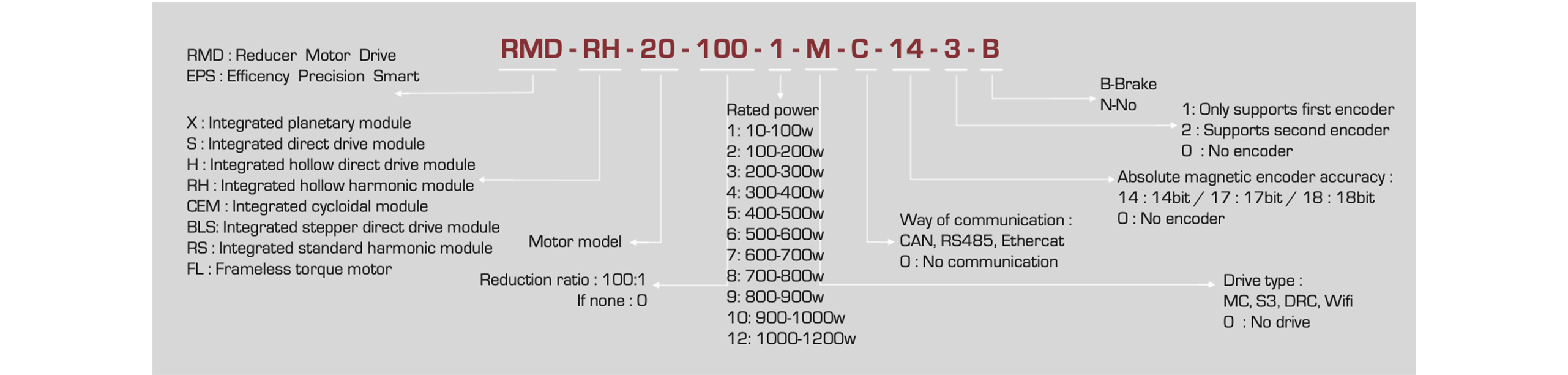
Moteur avec variateur intégré + codeur + réducteur
| Caractéristiques | |
| Type de réducteur | Réducteur planétaire |
| Rapport de réduction | 8:1 |
| Rendement moteur (%) | 78 |
| Codeur d'entrée | 16 bit |
| Codeur de sortie | 14 bit |
| Charge utile dans le sens axial (N) | 775 |
| Charge utile en direction radiale (N) | 1040 |
| Inertie (kg.cm2 | 6,8 |
| Nombre de paires de pôles | 14 |
| Couple d'entrainement arrière (Nm) | 0,1 |
| Jeu | 10 minutes d'arc |
| Poids (g) | N (sans frein) : 490 |