

| Achetez en ligne | - | - | EZI-SERVOII-EC-42L-A | EZI-SERVOII-EC-56L-A | - | |
|---|---|---|---|---|---|---|
| Modèle du moteur | EzM2-20-F series | EzM2-28-A series | EzM2-42-A series | EzM2-56-A series | EzM2-60-A series | |
| Type de variateur | EzS2-EC-20 series | EzS2-EC-28 series | EzS2-EC-42 series | EzS2-EC-56 series | EzS2-EC-60 series | |
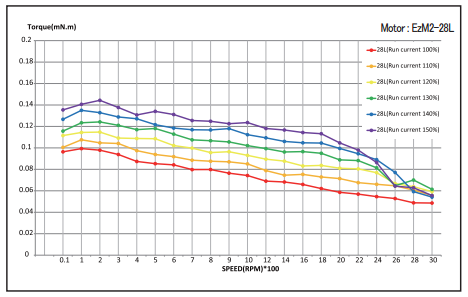
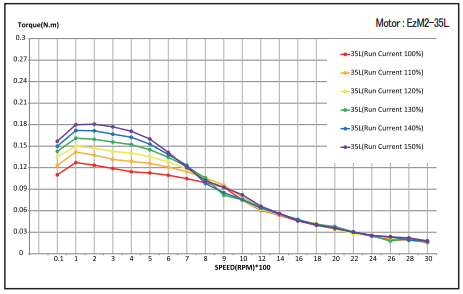
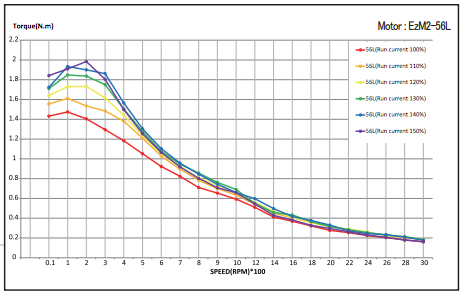
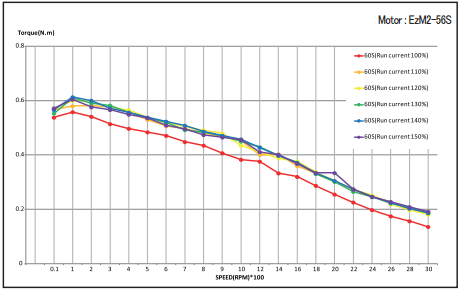
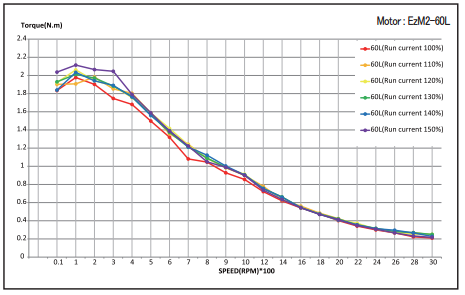
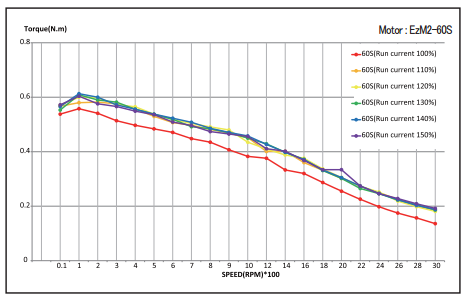
| Couple | De 0,02 à 0,039 Nm | De 0,065 à 0,14 Nm | De 0,32 à 0,65 Nm | De 0,64 à 1,5 Nm | De 0,88 à 2,4 Nm | |
| Bride | 20mm | 28mm | 42mm | 56mm | 60mm | |
| Tension d'entrée | 24VDC +-10% | |||||
| Méthode de controle | Contrôle en boucle fermée avec ARM 32bit MCU | |||||
| Consommation | Max 500mA (mis à part le courant moteur) | |||||
| Condition de fonctionnement : | ||||||
| Température ambiante | De 0 à 50°C en utilisation et de -20 à +70°C en stockage | |||||
| Humidité | De 35 à 85% en utilisation et de 10 à 90% en stockage | |||||
| Vib. Resist. | 0,5G | |||||
| Fonctions : | ||||||
| Vitesse de rotation | 0 à 3000 tr/min | |||||
| Résolution (P/R) | 10,000[P/R] | |||||
| Fréquence d'impulsion d'entrée max. | 500KHz(rapport cyclique : 50%) | |||||
| Fonctions de protection | Surtension, vitesse trop importante, erreur position de traking, surcharge, surchauffe, survoltage regénéré, erreur de connexion du moteur, erreur de connexion du codeur, erreur de tension du moteur, erreur de position, erreur ROM, position, erreur de débordement | |||||
| Affichage LED | Statut de puissance, statut en position, activer le statut, statut d'alarme | |||||
| EtherCAT | ||||||
| Différent mode | Synchronisation de position, profile de position, cycle de prise d'origine | |||||
| Synchronisation | Free Run, Sm Event, DC SYNC Event | |||||
| Protocol supporté | CoE(CIA 402 Drive profile), FoE (Téléchargement du logiciel) | |||||
| Signaux I/O | ||||||
| Signaux d'entrée | 3 entrées dédiées (limit+, limit-, origine) et 7 entrées utilisateur | |||||
| Signaux de sorties | 2 sorties dédiées (frein +, frein-), 6 sorties utilisateurs (optocoupleur) | |||||









Tension d'entrée : 24VDC
Courant du moteur : courant nominal (voir les spécifications du moteur)
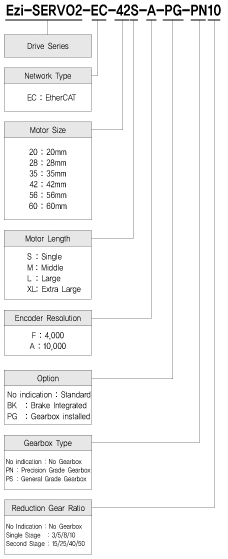
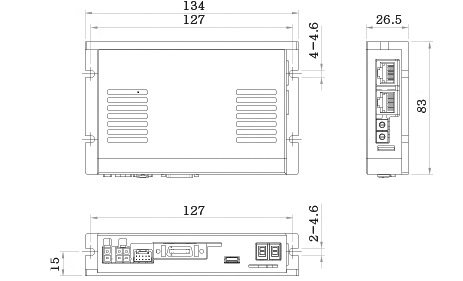
Variateur : Ezi-SERVO-II EtherCAT