

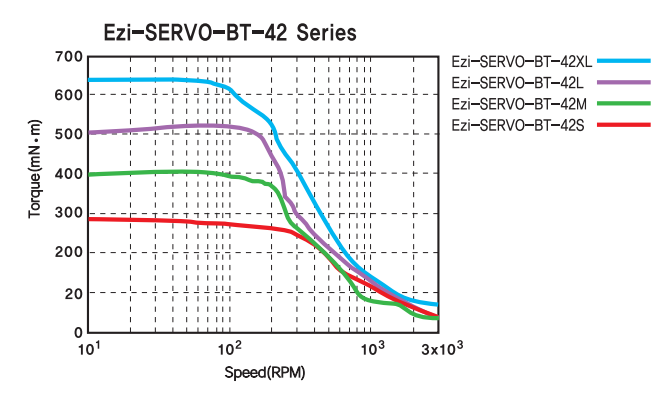
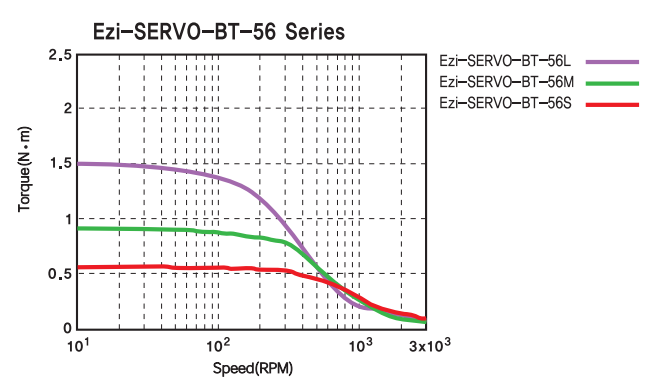
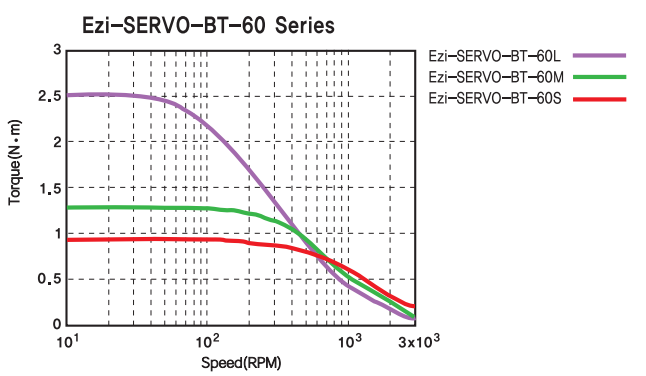
| Couple | Série 42 : De 0,62 à 0,65Nm Série 56 : De 0,64 à 1,5 Nm Série 60 : De 0,88 à 2,4 Nm |
||||||||
| Tension d'entrée | 24VDC +-10% | ||||||||
| Méthode de controle | Contrôle en boucle fermée avec DSP 32bit | ||||||||
| Consommation | Max 500mA (mis à part le courant moteur) | ||||||||
| Condition de fonctionnement : | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Température ambiante | De 0 à 50°C en utilisation et de -20 à +70°C en stockage | ||||||||
| Humidité | De 35 à 85% en utilisation et de 10 à 90% en stockage | ||||||||
| Vib. Resist. | 0,5G | ||||||||
| Fonctions : | |||||||||
| Vitesse de rotation | 0 à 3000 tr/min | ||||||||
| Résolution (P/R) | 10,000/Rev. Encoder model : 500 1,000 1,600 2,000 3,600 5,000 6,400 7,200 10,000 20,000/Rev. Encoder model : 500 1,000 1,600 2,000 3,600 5,000 6,400 7,200 10,000 20,000 (Sélectionnable avec commutateur) | ||||||||
| Fréquence d'impulsion d'entrée max. | 500KHz(rapport cyclique : 50%) | ||||||||
| Fonctions de protection | Surtension, vitesse trop importante, erreur position de traking, surcharge, surchauffe, survoltage regénéré, erreur de connexion du moteur, erreur de connexion du codeur, erreur de tension du moteur, erreur de position, erreur ROM, position, erreur de débordement | ||||||||
| Sélection de la position d'entrée | 0-F (sélectionnable avec le commutateur rotatif) | ||||||||
| Sélection de la position gain | 0-F (sélectionnable avec le commutateur rotatif) | ||||||||
| Méthode d'impulsion d'entrée | 1-Pulse/2-Pulse (Sélectionnable avec commutateur DIP) | ||||||||
| Contrôle commande de vitesse et position | Train d'impulsion d'entrée | ||||||||
| Signaux I/O | |||||||||
| Signaux d'entrée | Impulsion de la commande de position, Servo ON/OFF, réinitialisation de l'alarme (optocoupleur) | ||||||||
| Signaux de sorties | Position atteinte, alarme (optocoupleur) Signal codeur (A+, A-, B+, B-, Z+, Z-, 26C31 sortie line driver) | ||||||||

 Ezi-SERVO-BT-42Ezi-SERVO-BT-56Ezi-SERVO-BT-60
Ezi-SERVO-BT-42Ezi-SERVO-BT-56Ezi-SERVO-BT-60Tension d'entrée : 24VDC
Courant du moteur : courant nominal (voir les spécifications du moteur)
Variateur : Ezi-SERVO-BT